{kind=link}
“Positioning and navigation technology enables the robot to walk autonomously, avoid obstacles and reach the destination smoothly even when unmanned. Robots and humans draw maps. They need to rely on maps in the process of describing and understanding the environment. Mainly use maps to describe its current environment information, and use different map description forms as the algorithms and sensors used are different, so building a reliable map has an extremely important role for the robot, so how to build a map that meets the needs of robot navigation Woolen cloth? The following content is not to be missed (mainly for users who adopt Silan positioning and navigation technology)!
“
Positioning and navigation technology enables the robot to walk autonomously, avoid obstacles and reach the destination smoothly even when unmanned. Robots and humans draw maps. They need to rely on maps in the process of describing and understanding the environment. Mainly use maps to describe its current environment information, and use different map description forms as the algorithms and sensors used are different, so building a reliable map has an extremely important role for the robot, so how to build a map that meets the needs of robot navigation Woolen cloth? The following content is not to be missed (mainly for users who adopt Silan positioning and navigation technology)!
1. Whether the scope of the scene exceeds the limit of use
Before scanning the image, it is necessary to know whether the lidar in the robot exceeds the scanning range and the maximum mapping area. In mapping and positioning, the radar needs to scan to no less than two vertical boundaries at the same time.
2. Preparation before scanning the picture
1. Try to scan the picture when there are no people in the area to be scanned or when there are few people.
2. Try to remove frequently moving objects in the area to be scanned.
3. For objects such as light reflection, light transmission, and light absorption in the scene, if conditions permit, try to paste other materials that do not affect the normal scanning of the radar on the radar scanning plane of the robot.
3. Common objects in the environment that are likely to cause interference
Before starting to scan the image, you need to know which objects will affect the lidar, and according to the actual situation, determine whether these objects need to be processed. Generally speaking, the radar data book gives data based on materials with a reflectivity of about 70%. The following are some common objects that cause interference to radar. Note that the situations described in this article are all indoor environments.
1.Objects with low reflectivity, such as black light-absorbing walls, furniture, etc.
2.grass
3.Mirror, stainless steel and other mirror-reflecting objects
Fourth, the robot’s skills when scanning the map
1. When starting to scan the map, the robot is best to face a straight wall, and the radar can scan as many effective points as possible.
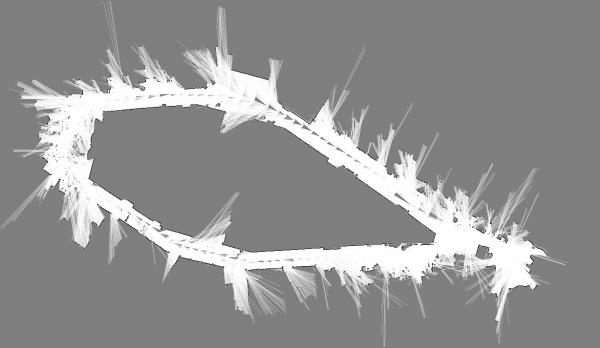
2. When building a large area, it is best to let the robot go to the closed loop first, and then scan the environment in detail.
3.Erase unexplored areas
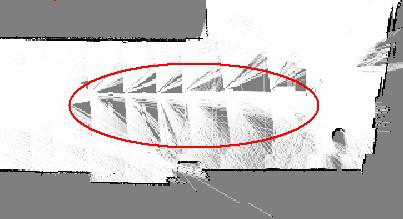
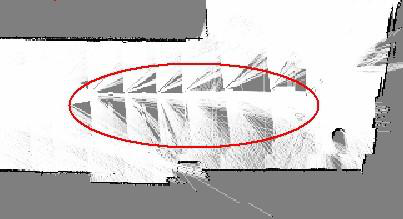
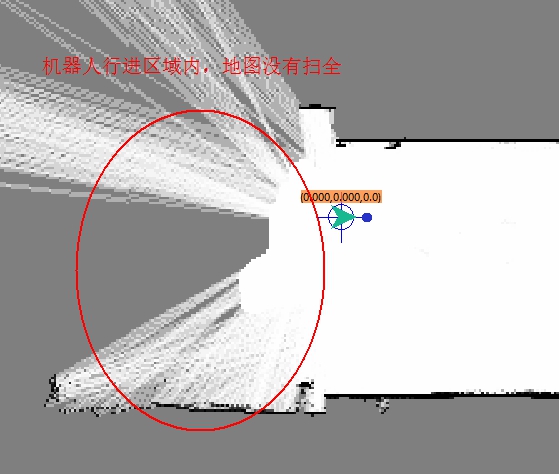
In the walking area of the robot, there may be some areas that are not fully ascertained when scanning the picture. The area here is shown in gray in RoboStudio (shown in the red circle in the figure below). If it is within this range, there is indeed no obstacle. For objects, you can use a white eraser to erase this gray area and become a proven area.
The following picture shows the toolbar of RoboStudio, with a white eraser in the red circle:
![]()
4. Use a white eraser to erase moving objects (people, moving objects)

5. Try to ensure the integrity of the map. On the possible walking path of the machine, all the surrounding 360-degree areas need to be detected by radar. The purpose is to increase the integrity of the map and make more reference points for laser matching.
6. If the map has been built, try not to walk back and forth repeatedly in the area where the map has been built. Please save the map as soon as possible. Click the sync map button on robostudio to save the map after synchronizing the map.
![]()
5. How to judge whether the scanned map meets the requirements
1.Understand whether the edges of obstacles in the map are clear

2. Whether there is an area inconsistent with the actual environment in the map (whether there is a closed loop)
3.Whether there is a gray area in the robot’s action area on the map
4. Whether there are obstacles in the map that will not exist during subsequent positioning (people walking when scanning the map, moving objects)
5. Whether the robot can be guaranteed to be anywhere in the active area, within a 360-degree field of view, has been ascertained.
The Links: PM300RLA060 DMF660N
0 Comments for “How to build a map that meets the needs of robot navigation?”