
Today, most soft robots rely on external power and control. Articulated soft robots are robots with hard and soft parts. They are inspired by the musculoskeletal system of vertebrates-from reptiles to birds to mammals to humans. . Compliance is usually focused on actuators, transmissions, and joints (corresponding to muscles, tendons, and joints), while structural stability is provided by rigid or semi-rigid connections (corresponding to the bones of vertebrates).
Now, researchers at Harvard University’s John A. Paulson School of Engineering and Applied Sciences (SEAS) and California Institute of Technology have developed a software robot system inspired by origami, which can move and change shape in response to external stimuli without being completely immune to Tethered soft robots paved the way, and the research was published in “Science Robots”.
 © Lori Sanders/Harvard SEAS
© Lori Sanders/Harvard SEAS
Blurred the boundaries between materials and robots
The core principle is that the 3D printed living hinge can change shape according to heat. When the temperature rises from ambient temperature to 100°C (top hinge activated) to 150°C (bottom hinge activated), the device exhibits sequential folding. Photo Credit: Lori Sanders/Harvard SEAS
According to Dr. Jennifer A. Lewis, the integration of active materials into 3D printed objects enables the design and manufacture of a whole new category of soft robotic materials. Researchers turned to origami to create multifunctional soft robots. Through continuous folding, origami can encode multiple shapes and functions in a single structure. The research team used a material called liquid crystal elastomer, which changes shape when heated, and 3D printed two types of soft hinges that fold at different temperatures, so they can be programmed to fold in a specific order. Through the 3D printing living hinge method, the temperature response, the amount of torque that the hinge can apply, the bending angle and the folding direction are fully programmable. The manufacturing methods of Harvard University and California Institute of Technology help to combine these active ingredients with other materials.
![]() Self-folding “Rollbot” paves the way for a completely unfettered soft robot
Self-folding “Rollbot” paves the way for a completely unfettered soft robot
To demonstrate this approach, the team built several soft devices, including an unfettered soft robot nicknamed “Rollbot.” The self-propelled Rollbot was originally a flat plate, about 8 cm long and 4 cm wide, and curled into a pentagonal wheel when placed on a hot surface. The hinges embedded in the five sides of the wheel fold when in contact with the surface, pushing the wheel to turn to the other side. When the hinges roll off the hot surface, they unfold and prepare for the next cycle.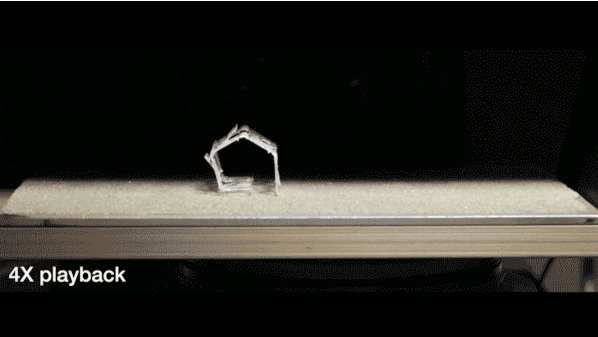 © Lori Sanders/Harvard SEAS
© Lori Sanders/Harvard SEAS
Using hinges makes it easier to program robot functions and control how the robot changes shape, through3D printingMake the deformation controllable, instead of making the entire body of the soft robot deform in an unpredictable way, through3D printingOnly a few small areas of the structure need to be programmed to set how to respond to temperature changes. Many existing soft robots need to be connected to an external power supply and control system, or are limited by the force they can apply. 3D Science Valley understands this3D printingActive hinges are useful because they allow soft robots to become more “autonomous and controllable” and can lift objects that are many times heavier than hinges.
![]() Self-driven
Self-driven
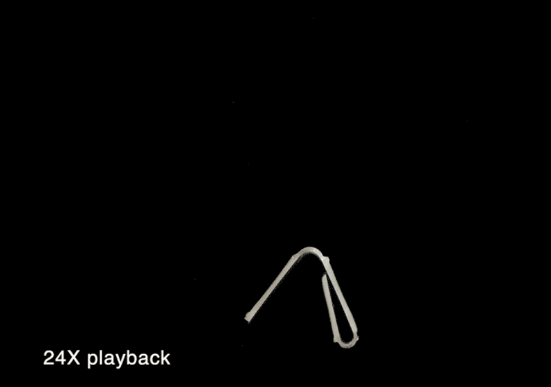
One design shows sequential folding, which can be folded into a compact folded shape similar to a paper clip when heated, and can unfold on its own when cooled. Another design, when placed in a hot environment, it can be folded into a compact folded shape similar to a paper clip, and unfold on its own when cooled. These unfettered structures can be passively controlled. All the researchers need to do is to expose the structure to a specific temperature environment, and these structures will respond according to the way the researchers program the hinge. Although this research only focuses on temperature response, liquid crystal elastomers can also be programmed to respond to light, pH, humidity, and other external stimuli.
This work shows how the combination of response polymers in composite materials can lead to self-driving capabilities in response to different stimuli. In the future, these materials can be programmed to perform more complex tasks, which blurs the boundaries between materials and robots. This research was supported by the Army Research Office, the Harvard Center for Materials Research Science and Engineering, the National Science Foundation, and NASA Space Technology Research Fellowships.
(Editor in charge: admin)
0 Comments for “Harvard University’s 3D printed self-folding “Rollbot” paves the way for a completely unfettered soft robot”