
China3D printingNet, April 9th, researchers from Nanyang Technological University in Singapore wrote a paper entitled “Development for Automatic3D printingRobot system for automatic part demolding”, this is their job, aiming to bypass3D printingMajor bottlenecks in post-processing. In powder bed AM processes, such as HP’s Multi Jet Fusion (MJF), fouling involves the removal of residual powder, which will stick to the part once it is removed. Most of this is done by operators using brushes, and for additive manufacturing technology that can mass produce hundreds of parts, this obviously takes a long time. Such manual labor is an important cost component of the powder bed fusion process.

3D printing
Powder on the parts” alt=”The operator manually
3D printing
Remove the powder from the parts” width=”620″ height=”466″ />
The operator manually3D printingRemove powder (peeling) from the parts.
“Combining deep learning with 3D perception, intelligent machine design, motion planning, and force control for industrial robots, we have developed a system that can automatically degrease parts quickly and efficiently. By using the Multi Jet Fusion printer A series of descaling experiments on the printed parts, we proved that based on3D printingThe feasibility of batch production robot descaling. “The researcher wrote.
A typical robotic problem is trash bin picking, which requires selecting parts from the container and removing parts from it. NTU researchers believe that the 3D perception of “recognizing objects and determining their 3D posture in the workspace” is essential for establishing their garbage collection system. They also used a position control manipulator as a reference system to ensure standard motion control.
The robot system of the NTU team performs five routine steps, starting with the task of picking a trash bin, in which suction cups pick out agglomerated parts from the original container. Clean the bottom surface by wiping it on the brush, then turn it over and clean the other side. The last step is to put the cleaned parts into the target container.

The proposed robot system design for automatic descaling.
Each step has its own difficulties; for example, agglomerated parts overlap and are difficult to detect because their color is roughly the same as the powder, and the remaining powder and parts have different physical properties, which makes it difficult for industrial robots using position control to manipulate Components.
“We are addressing these challenges by using (i) the latest advances in deep learning in 2D/3D vision; and (ii) intelligent machine design and force control.”
Due to the “contact control” between the parts, the robot and the brushing system, the next three steps (cleaning the part, turning the part and cleaning the other side) are very tricky. To this end, researchers use power control to “execute compliance actions.”
Their robotic platform is made of off-the-shelf components:
1 Denso VS060: Six-axis industrial manipulator
1 ATI gamma torque (F/T) sensor
1 Ensenso 3D camera N35-802-16-BL
1 suction system, powered by Karcher NT 70/2 vacuum machine
1 cleaning station
1 turning station
The camera helps avoid collisions with the environment, objects and robot arms, and “maximizes the viewing angle.” People have found that the suction cup system is the most versatile. They specially designed the suction cup system to generate high air flow and vacuum to recover the recyclable powder, obtain sufficient lifting force, and firmly fix the parts when brushing the teeth.

Cleaning station, including fan, brush holder and vacuum outlet.
They chose a passive turning station (no actuator required) to change the part orientation. The part is dropped from the top of the workstation and moves along the guide slide. Once it reaches the bottom, it flips over and can then be picked up by the robotic arm.
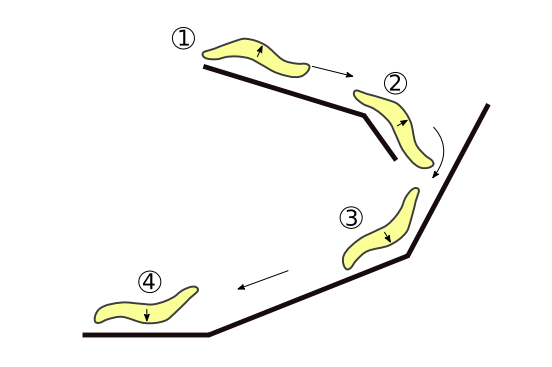
Turn over the station.
The state machine and a series of modules form the software system. The machine selects the correct module and executes it at the correct time, and selects the “most feasible part” in order to agglomerate.
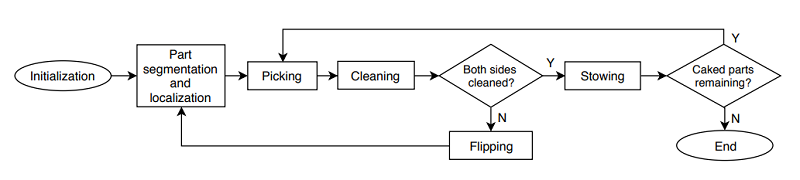
The state machines and modules of the software system perform perception and different types of actions.
“The state machine can access all the basic information of the system, including the type, posture, geometry, and cleanliness of all objects detected in the scene. Each module can query this information to achieve its behavior. As a result, this design is Universal, can adapt to more types3D printingComponents. “The researcher explained.
These modules have different tasks, such as perception, recognizing and locating visible objects. The first stage of the task uses a deep learning network to complete instance detection and segmentation, while the second stage uses a segmentation mask to extract the 3D points of each object and “estimate the object pose”.
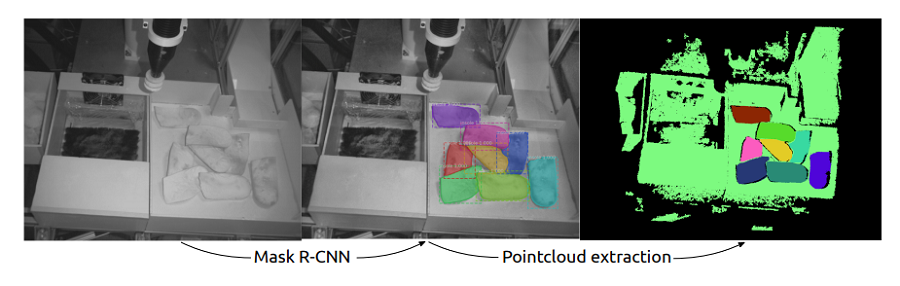
An example of a target detection module based on Mask R-CNN. The estimated bounding box and part segmentation are depicted in different colors and marked with recognition suggestions and confidence. We reject tests with a confidence level of less than 95%.
The researchers wrote: “First, a deep neural network based on Mask R-CNN classifies objects in RGB images and performs instance segmentation to provide pixel-based object classification.”Transfer learning is applied to the pre-trained model, so the network can classify a new class of objects in the trash can with a higher detection rate.Second, complete the pose estimation of the part by estimating the bounding box and calculating the centroid of the segmented point cloud. The point cloud of each object is optimized (for example, statistical outlier removal, normal smoothing, etc.) and used to verify whether the object can be picked up by suction (ie, the exposed surface must be larger than the suction cup area). “
The pickup and cleaning module consists of multiple motion primitives, the first of which is pickup or suction. The robot picks up parts with almost flat and bare surfaces by moving the suction cup on the part, and instructs when to stop moving downwards through a compliant force control. It will check whether the height of the suction cup stopped on it is consistent with the expected height, and then lift the suction cup, while the system will “continuously check the force and torque sensor” to ensure that there is no collision.Clean motion primitives can remove almost flat3D printingResidual debris and powder in the part. The parts are located above the brush holder, and the compliant force control moves the robot until they touch. In order to maintain contact between the part and the brush, a hybrid position/force control scheme is used.The researchers explained: “The plan for cleaning the trajectory follows two patterns: spiral and linear.” “Although spiral motion is very suitable for cleaning almost flat surfaces, linear motion helps remove powder from recessed areas.”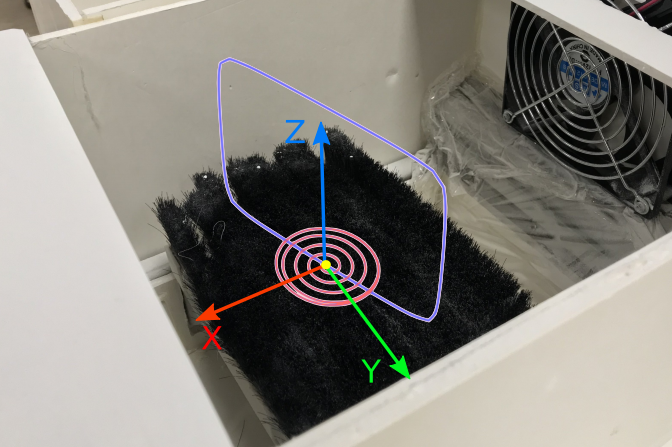
The combination of the spiral path and the straight path is used for the cleaning movement. The spiral path is red. The yellow dots indicate the center of mass of each part at the beginning of the movement. The spiral paths are modified so that they continue to circle the points after reaching the maximum radius. The path of the retina is blue, and the parameters include the width, height and direction in the XY plane.
Ten types used by the team3D printingThe insoles tested their system. The cleaning quality of the parts was evaluated by weighing the parts before and after cleaning, and compared with a skilled operator, the researchers reported the operating time of the system in a real environment.In terms of cleaning quality, the performance of the robotic system has almost been reduced by a factor of two, which “raised people’s questions about how to further improve task efficiency.” Humans spend more than 95% of the execution time on brushing their teeth, while the system only performs 40%. Brushing teeth; this is due to a person’s “advanced skills in performing sensing and dexterity.” However, if you limit the brushing time to 20 seconds, it will reduce the cleaning quality, which may mean that the cleaning quality can be improved by upgrading the cleaning table and “extending the brushing time”.In addition, humans can adjust their actions as needed, so more consistent results are obtained. Researchers believe that adding a cleanliness assessment module to their system together with a second 3D camera will improve this.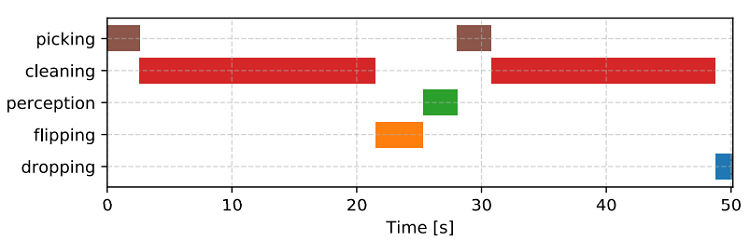
Average timeline representation of actions used for cleaning.
China3D printingNet original article!
(Editor in charge: admin)
0 Comments for “NTU Singapore: Robotic post-processing system removes residual powder in 3D printed parts”