
China3D printingNet, March 13th, Hyeonjun Park and Dongdong Kim of Kyung Hee University in South Korea have innovated in the field of robotics and described their work in detail in the recently released “Open Source Anthropomorphic Robot Hand System: HRI Hand”.
The HRI manual system is open source and reasonably priced, allowing users to perform at a price of about US$5003D printing. The system was developed with a five-finger structure, and the author kept the collaborative robot technology in mind when creating the hand. This idea continues to evolve in manufacturing, allowing robots to cooperate with human industrial workers to complete tasks. End effectors are becoming more and more widely used, in addition to simple parts picking and placing operations, but also for picking and assembly.
![Two types of finger end effectors: (a) gripper type[9],[21], (B) Anthropomorphic type](/wp-content/uploads/2021/12/1-200313091242T9.jpg "Two types of finger end effectors: (a) gripper type[9],[21], (B) Anthropomorphic type")
Two types of finger end effectors: (a) gripper type[9],[21], (B) Anthropomorphic type
Typical manipulators are the gripper (most common) type and the anthropomorphic multi-finger type. Although the manipulator is usually used by industrial users, it can only perform the most basic tasks and cannot provide support for operating machines or any tasks that require precision. On the other hand, the “anthropomorphic” type imitates a human hand, has both form and function, has five fingers, and is capable of performing “a wider range of applications than the simple gripper type.”
However, as the functions become more complex, more complex parts and software must be written, such as actuators, various mechanisms and control algorithms.
 3D modeling, (b) suggested robot hand, and (c) HRI hand with UR3 manipulator")
HRI hand: (a) 3D modeling, (b) suggested robot hand, and (c) HRI hand with UR3 manipulator
An anthropomorphic hand designed according to a typical male hand has four fingers, including:
Remote finger (DIP)
Proximal Point Between Fingers (PIP)
Metacarpophalangeal joints
The thumb includes:
Between Fingers (IP)
Palm Finger (MCP)
Carpal (CMC) joint
The thumb “…” uses two motors to operate the MCP and CMC connectors. The motor is controlled based on the control signal received by the microcontroller unit (MCU) through Bluetooth communication. URDF, python node and rviz software packages are also provided to support the Robot Operating System (ROS). All hardware CAD design files and software source codes have been released and can be easily assembled and modified. “The author explained.
The finger module includes four links and three joints (MCP, PIP and DIP joints).

HRI hand specifications

The architecture of the HRI manual system. Data protocol used to control HRI hands.

The design of the finger module.
The project also includes all detailed information about hardware files, software files, components, electronic device configuration, operating procedures, robot operating system procedures, etc.
 the front of the fingers, (b) the back of the fingers, (c) the thumb, (d) the palm and palm sleeve, (e) the wrist, (f) the back of the HRI hand Cover and ISO 9409-1-50-4-M6 part")
HRI hand assembly procedures: (a) the front of the fingers, (b) the back of the fingers, (c) the thumb, (d) the palm and palm sleeve, (e) the wrist, (f) the back of the HRI hand Cover and ISO 9409-1-50-4-M6 part

Robot grip classification
“The system proposed in this article is developed with a five-finger structure, but each finger is modular, so end effectors with various shapes can be developed according to the shape of the palm. For example, various types of end effectors can be constructed according to the researcher’s purpose. Type of end effector, such as a two-finger gripper with two fingers or a three-finger gripper with three fingers.
For those interested in implementing various robotic applications using the proposed system, we strongly recommend contacting the corresponding authors to discuss potential collaborations. “
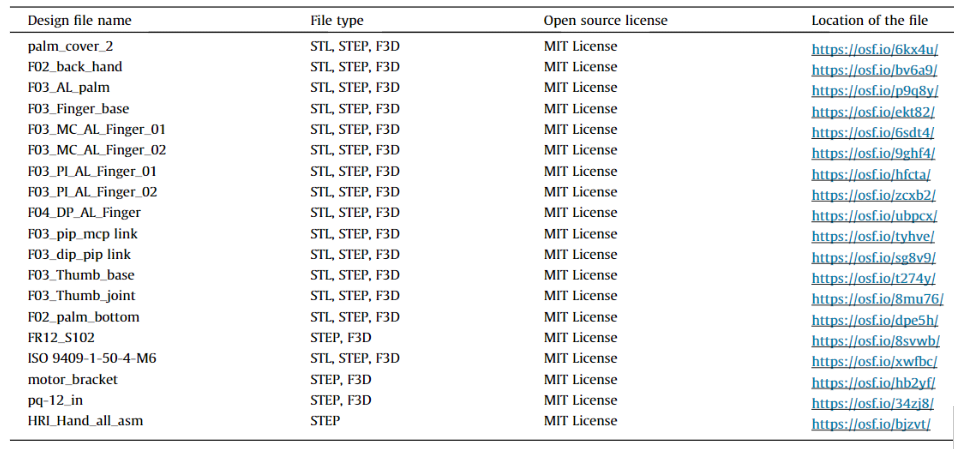
Summary of HRI Hand’s Design Documents
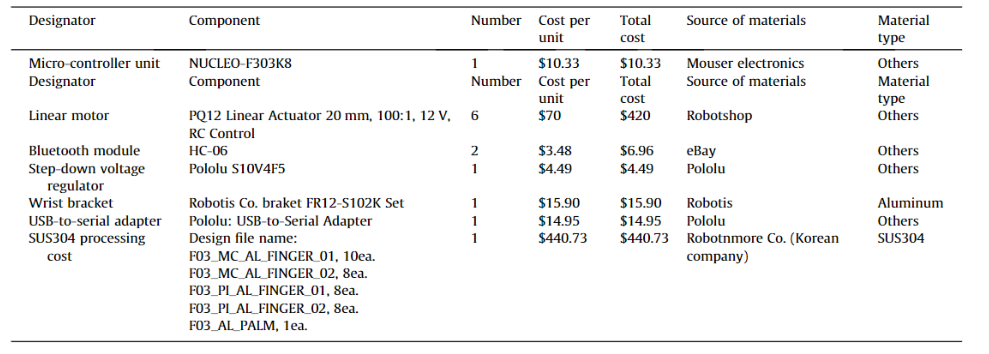
Bill of Materials for HRI Manual System
China3D printingNet original article!
(Editor in charge: admin)
0 Comments for “South Korea develops open source 3D printing anthropomorphic robot hand system HRI”