
China3D printingNet September 26, XRobots’ James Bruton is a robotics engineer and also 3D printingFan r, he has started to develop his3D printingV3 of the robot dog.
This open-source project called openDog has been running for several years and aims to be a more accessible and cost-effective alternative to Boston Dynamics Spot (retail price of approximately $75,000). In addition to motors, bearings and some other components, the robot can also be completely 3D printed on a low-cost FDM system, such as LulzBot TAZ Workhorse Bruton happened to use.
Bruton Said: “In the past few years, many of my regular customers will see the development of my robot dog. The last working robot dog I built is openDog V2, and it works fine. So now is the time for openDog V3 — This version uses the cycloid driver I developed in the past few months. I will eventually release it as open source while the CAD and code are running.”

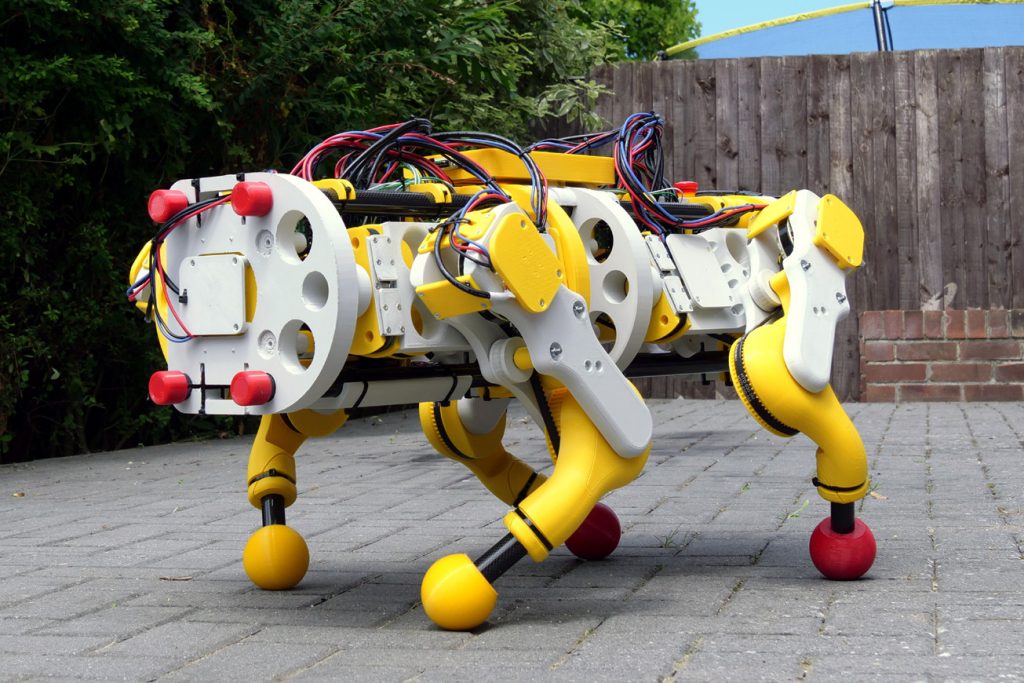
OpenDog V3 next to James Bruton, still under development
openDog V2 and openDog V3
So what has changed since openDog V2? During the last iteration of the development process, Bruton discovered that the most agile robot dogs are those with a gear train that can be driven backwards. These allow the dog’s legs to be natural springs, just like the suspension of a car, except that the elasticity can be controlled in real time by using software to change the driving mode of the motor.
However, in order to make the gear train that can be driven backwards work, he needs a considerable amount of torque, because ideally the drive reduction ratio needs to be less than 10:1. Kaiyuangou’s V2 relies on a conveyor belt-based deceleration system, because it was the simplest solution that Bruton could design at the time, but due to the physical space constraints of the belt and pulley, the system only provided a 5:1 deceleration.
For openDog V3, he had to implement a new and more compact gearbox solution. Bruton wanted the hardware to remain as open and accessible as possible, so it needed to be 3D printable, durable, and able to move quickly. In the end, he chose a cycloidal drive gearbox, which uses a cycloidal disk instead of traditional gears.
The engineer said: “I have done a lot of tests on these reductions, including letting me push me on the skateboard for a few miles without obvious wear, and they are all printed with PLA. I have built a test robot dog using two cycloid drives. Legs. This time, we will build 12 and put them all into the mechanical components of openDog V3.”
openDog V2, the previous iteration of the project.Photo fromJames Bruton(James Bruton).
The power of open source 3D printing
According to China3D printingWang understands that most of the prototype design of openDog V3 has been completed, and Bruton is optimistic about the results of the open source project. The new cycloid drive has almost no backlash, resulting in a sturdy and sturdy structure. The robot can also be folded into a clean, compact form, which means it can be packed into an air box for transportation.
Since the body does not have any electronic equipment, the current weight of the V3 is about 20 kg, but it is expected to reach 25 kg when completed. This is much lighter than the Boston Dynamics Spot, which weighs about 32 kg. Other features of openDog V3 include extra battery space to double battery life, carbon fiber tubes to strengthen the frame, and 3D printed TPU feet to absorb shocks.
(Editor in charge: admin)
0 Comments for “The engineer develops the open source 3D printer Dogg V3 and makes it work normally”