
In recent years, Soft Robotics technology has developed rapidly. Different from traditional robots, soft robots have the advantages of high flexibility, safe operation, light weight, simple production and low manufacturing cost. Its applications are currently mainly in various industrial grippers and medical/rehabilitation devices. The core components of soft robots are composed of flexible materials. How to choose suitable materials and manufacturing methods to make them not only meet the design requirements, but also carry their due functions. This article introduces the soft rehabilitation mechanical gloves invented by Professor Tang Qiyu of the Chinese University of Hong Kong and his team, in which ACEO® 3D printingThe software drive unit made of organic silicon provides us with a new idea and solution.
The latest development of software rehabilitation manipulators
Stroke is one of the main causes of disability. One person in the world has a stroke every 6 seconds, half of which occur in China. Hand paralysis is one of the common and difficult sequelae of stroke. The first 3 months after the stroke is the golden recovery period when the hand function may be restored to the best condition. Studies have shown that the same and repetitive exercise of the damaged hand can make the brain gradually perceive and restore movement control functions, thereby promoting rehabilitation after stroke. At present, a variety of hand rehabilitation devices have been developed to replace expensive and time-consuming work of physical therapists. However, the existing devices are heavy and bulky, and most of them cannot provide assistance for patients in daily life, such as picking up simple objects. This is also a problem caused by hand spasm after stroke.
Recently, a silicone was invented by Professor Tang Qiyu, Professor Li Zheng and their team of the Chinese University of Hong Kong3D printingSoftware rehabilitation mechanical gloves solve these problems well.This lightweight and soft mechanical glove can be tailor-made according to the size of the patient’s fingers and palm. It uses WACKER ACEO® silicone3D printingTechnology, using soft rubber drivers to help patients control their hand muscles to bend and stretch their fingers, help improve the patient’s hand mobility in daily life, and also provide patients with a customizable and affordable rehabilitation training program. At the 47th Geneva International Invention Exhibition held in April 2019, this soft mechanical glove won a silver award.

ACEO® Silicone3D printing
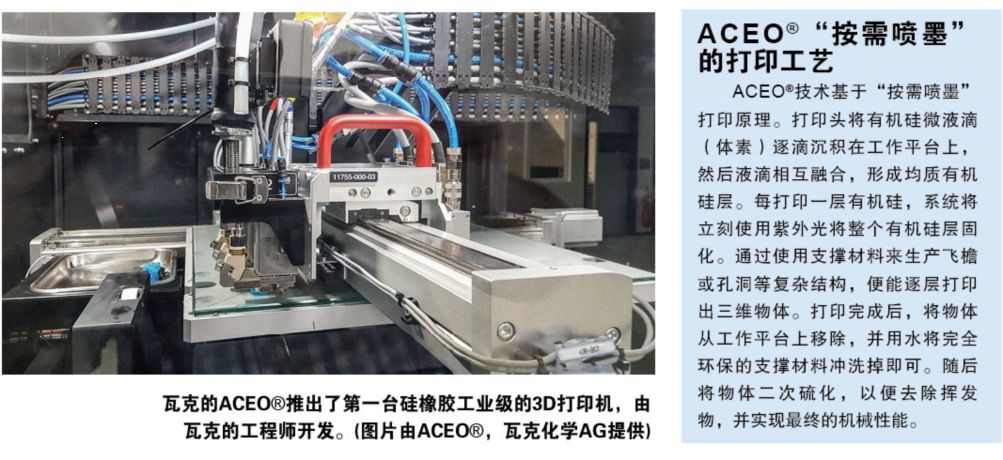
The reason for using3D printingThe reason why the soft drive for mechanical gloves is made is because the traditional mold making process requires many steps and long time.3D printingIt can reduce the steps of making soft drives and greatly shorten the production cycle. also,3D printingIt also provides design freedom. ACEO®’s unique drop-on-demand inkjet technology enables unprecedented product design and complex geometric structures (such as hollows, cornices, etc.) to be realized, while retaining the excellent properties of silicone, such as high elasticity, heat resistance, UV resistance, and Tension and compression deformation, etc.These properties can be preserved throughout the ACEO® printing process, so WACKER’s3D printingThe products are comparable to those made by injection molding or rapid compression molding.
According to Xiang Haolin, a main member of the invention team and a doctoral student at the Chinese University of Hong Kong, the materials required for the soft drive designed by him focus on the elongation and durability that the material can provide under conditions of large deformation. When ACEO® is not enabled 3D printingBefore silicone, the team also tried two other3D printingManufacturers provide similar rubber materials, but these products have low durability and cannot support large deformations. “We need silicone that can withstand high-strength pressure and large deformation for a long time. We found that ACEO®3D printingThe silicones that can meet these requirements,” Xiang Haolin explained.
Soft drive and its development prospects
The soft drive contains a silicone elastic airbag, and there is a non-extensible bead at the bottom of the part, which plays a role of torque compensation. When the airbag is pressurized with fluid (liquid or gas), the airbag will roll up toward the side of the bead, and the actuator will bend the fingers. After the fluid pressure is decompressed, the airbag stretches the fingers wearing the device, thereby assisting the patient to complete a complete opening and closing hand movement.
A few days ago, after a stroke patient put on this soft rehabilitation mechanical glove equipped with a soft rubber driver, he could open and close his palm smoothly, and successfully grabbed a Chinese chess piece and twisted it with another normal hand. towel.
“We are still improving the durability and elongation of the material during bending. If the material is strong enough, we can put more pressure on the soft drive to further increase its output strength.” Xiang Haolin said, “We also hope to be able to3D printingA greater number of soft drives. Of course, even in commercial mass production, quality is still the first element. “
Thanks:
Xiang Haolin, PhD student in the Department of Biomedical Engineering, The Chinese University of Hong Kong
The pictures and videos of software rehabilitation mechanical gloves are provided by Dr. Xiang Haolin
Reference materials:
Heung HL, et al. (2019) Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. SOFT ROBOTICS, DOI: 10.1089/soro.2017.0125
Tang ZQ, et al. (2019) Model-based online learning and adaptive control for a “human-wearable soft robot” integrated system. Int J Robot Res.
https://doi.org/10.1177/0278364919873379
Heung HL, et al. (2019) Design of a 3D Printed Soft Robotic Hand for Stroke Rehabilitation and Daily Assistance (IEEE Int Conf Rehabil Robot, Toronto, Canada), pp 65-70.
(Editor in charge: admin)
0 Comments for “Magical soft rehabilitation mechanical gloves-a soft robot made of silicone 3D printing”